DOI: 10.1109/TIE.2023.3306396
Abstract
This study proposes a novel impact driver mechanism (IDM)-assisted displacement sensor based on the time-sharing-control-based measurement method and the IDM-assisted mechanism. This innovation enables traditional capacitive displacement sensors to break through their range limits and to be used for feedback control in the positioning system of precision instruments, such as scanning probe microscopes and astronomical telescopes. To allow the IDM to drive a larger mass sensor probe, a flexible isolation structure is designed based on the dynamic mass isolation principle and together form the IDM-assisted probe. The IDM-assisted probe together with the combination fixture form the IDM-assisted mechanism. Through the utilization of the time-sharing-control-based measurement method, the IDM-assisted displacement sensor achieves a large measuring range by working in synergy with the positioning system. The IDM-assisted sensor is designed and manufactured. Experimental results show that the IDM-assisted sensor can achieve displacement measurements with a resolution of 0.3 nm RMS and a range of 1.6 mm. The IDM-assisted sensor has been applied to the feedback control of a designed positioning system and experimental results have shown that it effectively improves the nonlinearity of the positioning system, reducing it from 10 % to 1 %.
文章摘要
基于分时控制的测量方法和 IDM 辅助机构,本研究提出了一种新型的冲击驱动机构 (IDM) 辅助位移传感器。这一创新突破了传统电容式位移传感器的量程限制,可用于扫描探针显微镜和天文望远镜等精密仪器定位系统的反馈控制。为了使 IDM 能够驱动大质量的传感器探头,我们根据动态质量隔离原理设计了一种柔性隔离结构 (FIS),IDM、传感器探头和FIS一起共同构成 IDM 辅助探头。IDM 辅助探头与组合夹具共同组成 IDM 辅助机构。通过利用基于分时控制的测量方法,IDM 辅助位移传感器与定位系统协同工作,实现了较大的测量范围。设计并制造了 IDM 辅助传感器。实验结果表明,IDM 辅助传感器可实现 0.3 nmRMS分辨率和 1.6 mm 量程的位移测量。IDM 辅助传感器已应用于设计的定位系统的反馈控制,实验结果表明,它能有效改善定位系统的非线性,将其从 10 % 降低到 1 %。
图片摘要
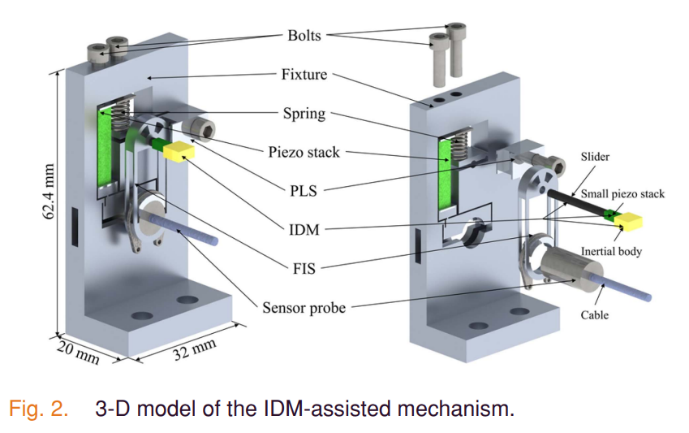
本文提出的IDM辅助机构如下图所示,它由组合夹具和IDM辅助探头构成。组合夹具用来夹紧IDM的滑杆和传感器探头。IDM辅助探头可以高效快速的去掉传感器探头向前和向后移动,其位移分辨精度为0.7 um。
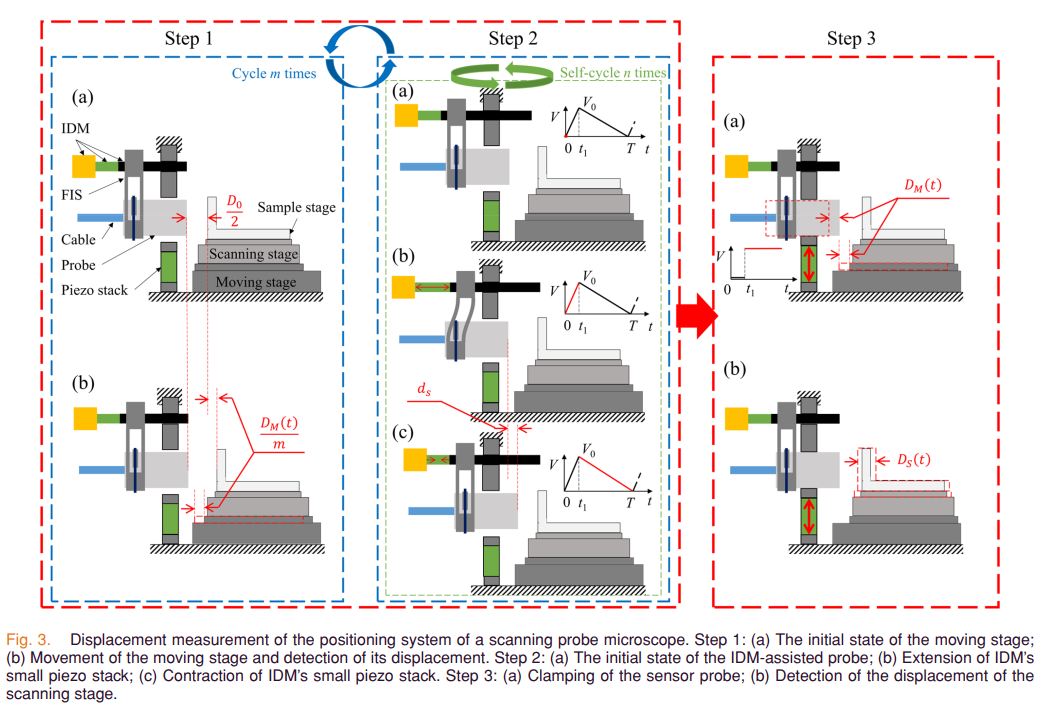
基于分时控制的测量方法如下图所示,它帮助了传统的电容传感器突破了量程的限制。其基本工作原理是:在保证定位系统不超出传统电容传感器的量程情况下,分别分时驱动传统传感器探头和定位系统移动,如此在定位系统可以实现任意距离移动的同时,通过数据分析可以使用传统的传感器对定位系统进行精确的位移监测。
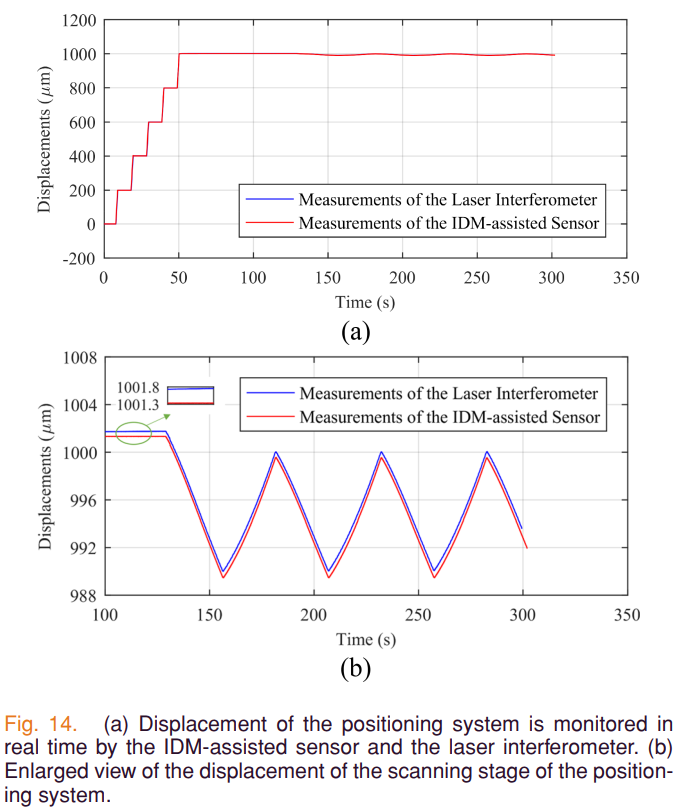
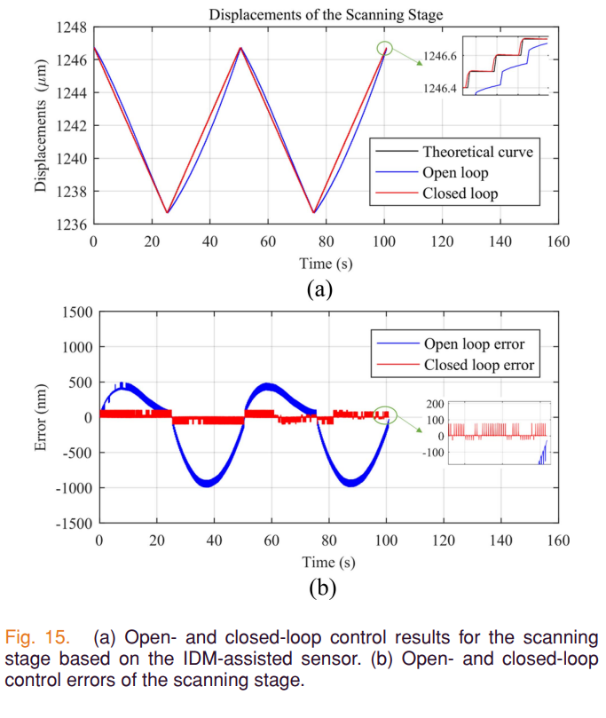
如图14所示,我们使用设计的IDM辅助的电容位移传感器对定位系统的长距离移动以及短距离的扫描运动进行了实时监测并与激光干涉仪进行对比测试,测试结果吻合较好,误差在理论范围内。如图15所示,是将IDM辅助的电容位移传感器用于定位系统的闭环控制,从图中可以看出,闭环的控制精度远远优于开环。
亮点
基于动态质量隔离原理,我们一个IDM辅助探头,它可以高效快速的驱动大质量探头,并与组合夹具一起构成IDM辅助机构。
提出了基于分时控制的测量方法,它可以帮助传统的传感器突破量程的限制,实现大量程的测量,并用于定位系统的相关控制。
在IDM辅助传感器的帮助下,定位系统的非线性从 10 % 降低到 1 %。