DOI: 10.1063/5.0202296
Abstract
This paper proposes a two-dimensional calibration method for resolving the nano-positioner pedestal micro-deformation crosstalk errors during the auction process. This refinement aims to enhance the nano-positioner’s accuracy and reduce coupling crosstalk errors. The reaction force exerted by the piezoelectric actuator can cause micro-deformation in the nano-positioner sensor pedestal, causing substantial errors in uncalibrated closed-loop control. This phenomenon has been previously overlooked. According to the two-degree of freedom parallel-symmetric decoupled nano-positioner deformation characteristics, a two-dimensional calibration matrix is proposed to suppress the crosstalk between two axes caused by the micro-deformation of the sensor pedestal. Experimental results show that the calibrated closed-loop system reduces X-axis and Y-axis coupling crosstalk errors to 1/67th and 1/18th of the uncalibrated closed-loop system, respectively, concurrently enhancing the positioning accuracy to 11.8 and 17 times that of the uncalibrated closed-loop system. The calibrated closed-loop feedback control method proposed in this paper proves effective for all compact nano-positioners with pedestal deformation issues. This research provides a crucial reference for the design of nano-positioners, offering insights into enhancing their accuracy and mitigating crosstalk issues.
图片摘要
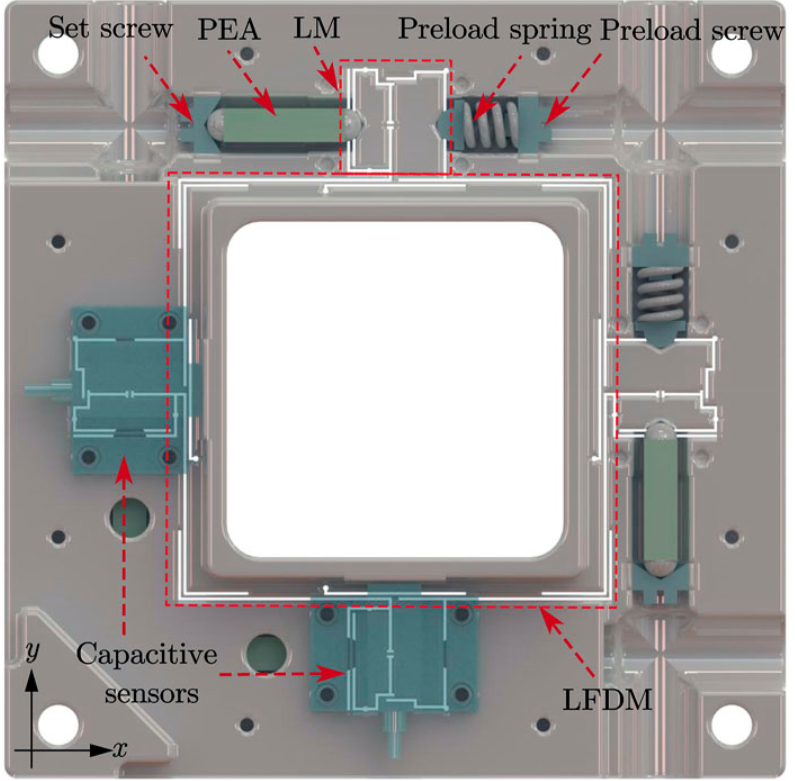
图一:纳米定位器的剖视图。
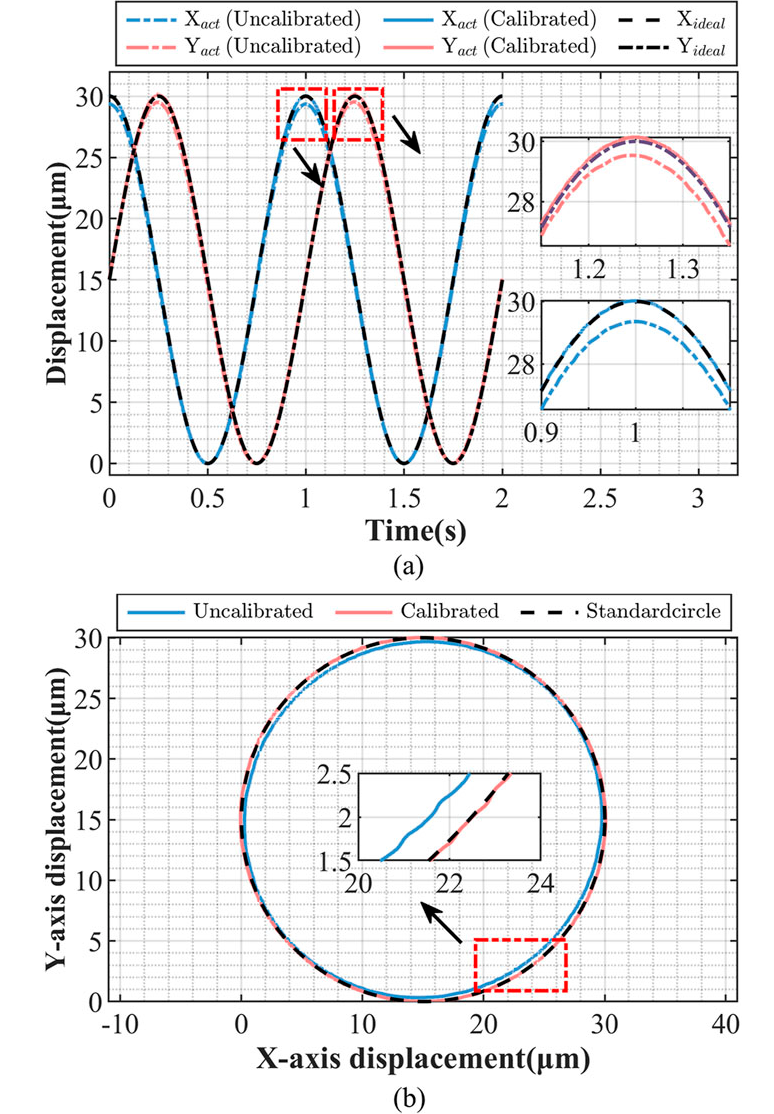
图二:未校准和校准闭环控制下圆形轨迹跟踪结果的比较。(a)单轴正弦轨迹的比较。(b)圆形轨迹的比较。
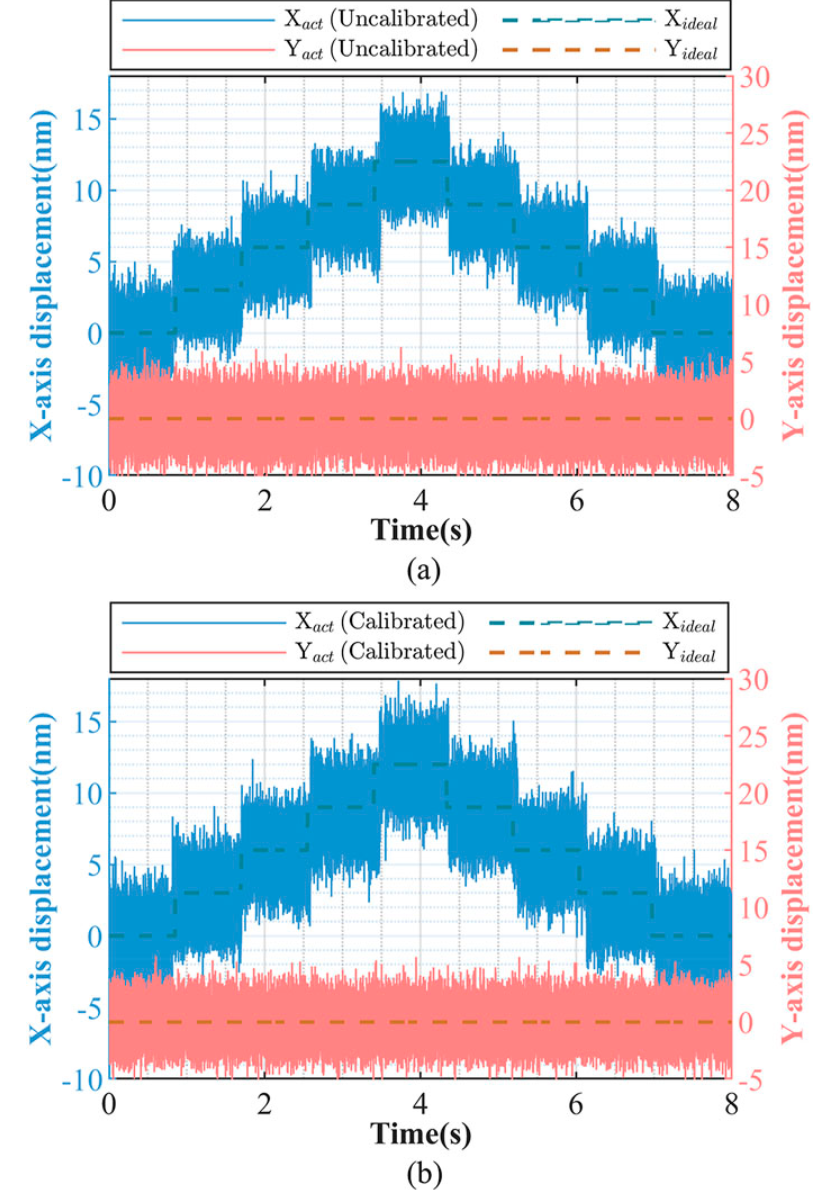
图三:X轴分辨率测试的实验结果。(a)未校准闭环。(b)校准闭环。