DOI: 10.1364/AO.576785
Abstract
A method for the co-focus closed-loop control of segmented primary mirrors in astronomical telescopes is proposed based on pose detection. The pose changes of each segment relative to a reference segment are calculated by constructing a Pose Estimation Matrix.Subsequently, the required actuation values for each segment are computed using the Pose-to-Actuation Mapping Matrix.The parameter analysis evaluates the noise characteristics of a system composed of four segmented mirrors. Experimental validation on a four-segment subsystem of the LAMOST primary mirror Mb demonstrate that the proposed co-focusing control method can converge the system focal spot to within 0.1 arcsec even under temperature variations exceeding 12 °C, and thus enables the long-term confocal maintenance during continuous operation.
文章摘要
本文提出一种基于位姿检测的天文望远镜分段主镜共焦闭环控制方法。通过构建位姿估计矩阵,计算各子镜相对于参考镜的位姿变化量,进而利用位姿-促动映射矩阵解算出各子镜所需促动量。通过参数分析评估了四镜面系统的噪声特性。在LAMOST主镜Mb的四镜面子系统上进行实验验证,结果表明该共焦控制方法能在超过12°C的温度变化环境下,将系统光斑收敛至0.1角秒以内,从而实现连续运行期间的长期共焦保持。
图片摘要
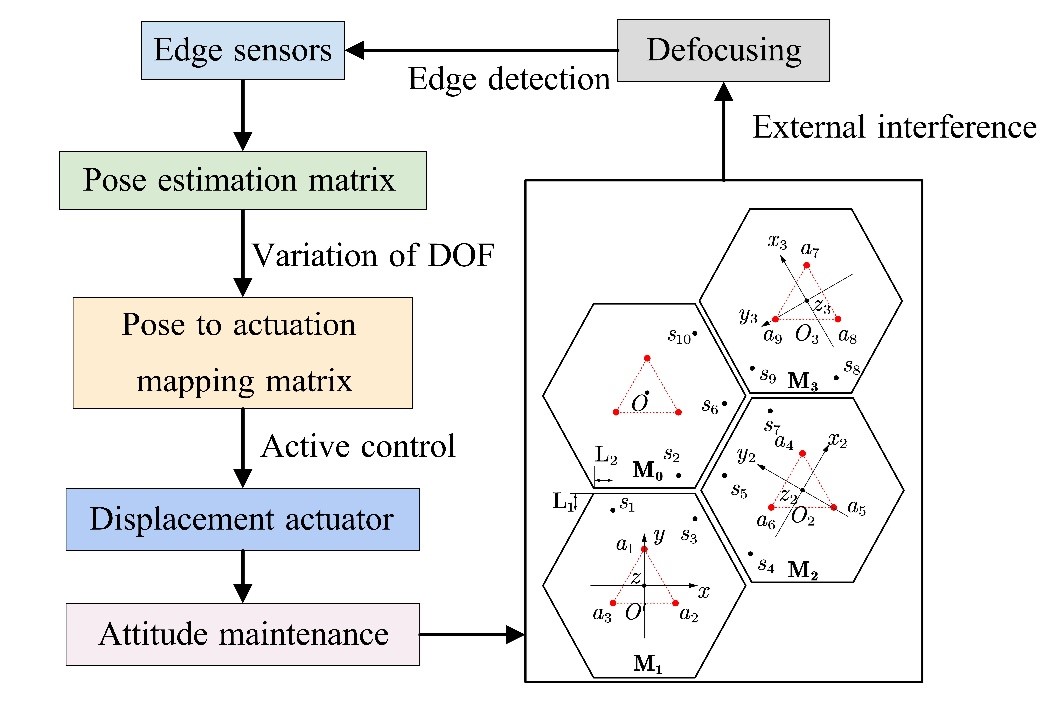
图一:闭环控制策略。
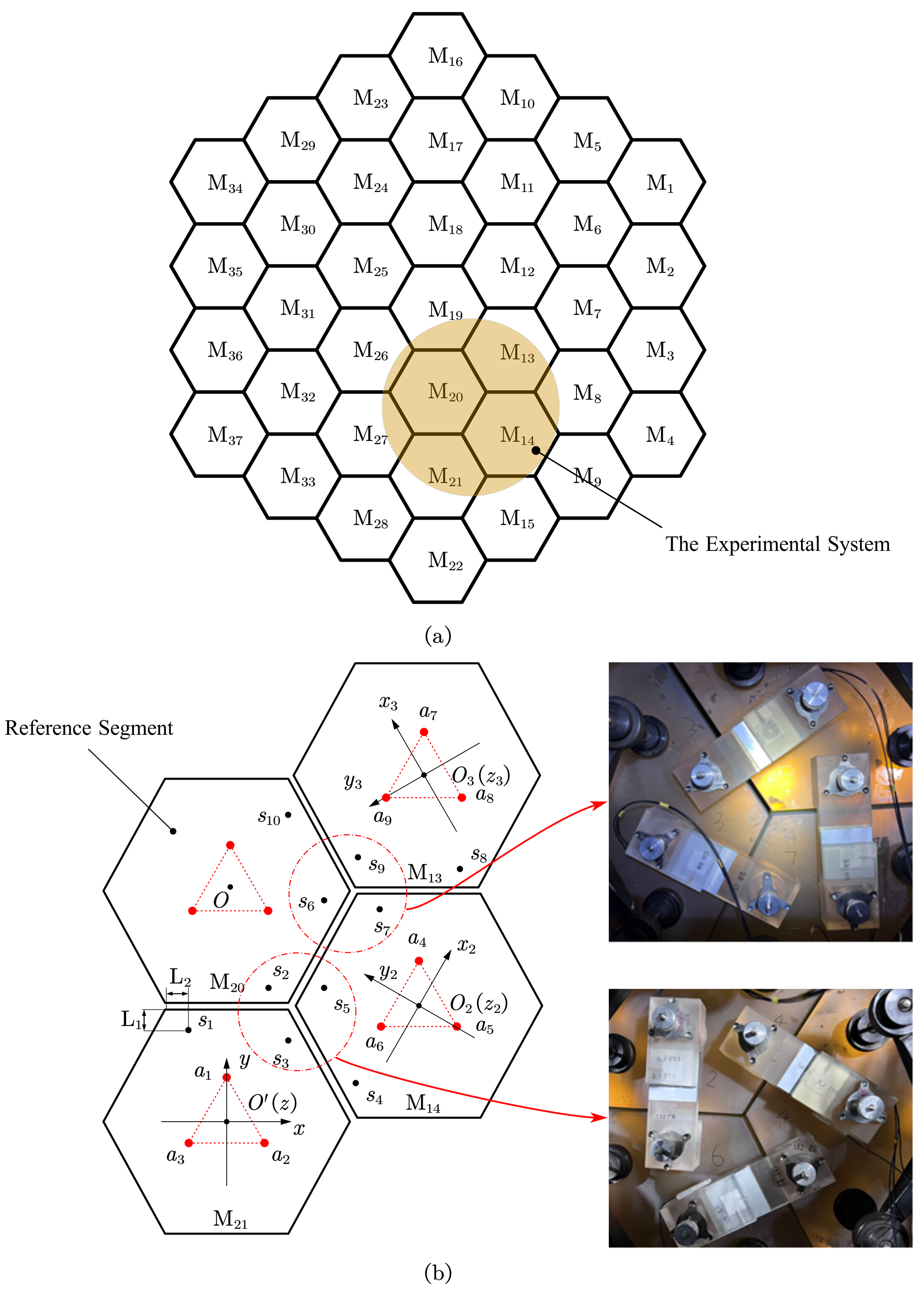
图二:(a)在MB主镜上所选用的局部系统,(b)边缘传感器安装布局。
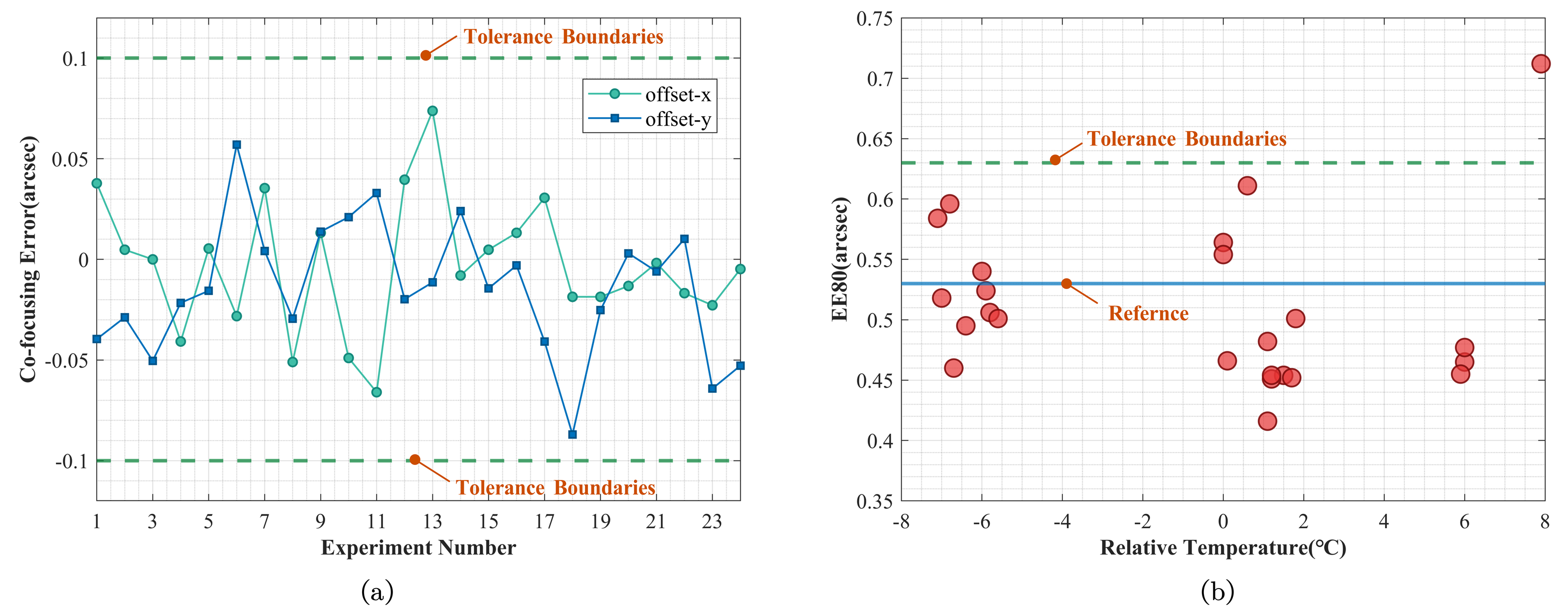
图三:共聚焦实验结果:(a)系统光斑中心在焦平面上相对于参考光斑中心的偏差,(b)EE80值与相对温度的关系。
亮点
本研究聚焦于应用涡流边缘传感器实现天文望远镜分段主镜的共焦保持。针对现有共焦保持方法在环境扰动下聚焦精度下降的问题,提出了一种基于子镜空间位姿估计的控制方法。通过构建位姿估计矩阵,根据传感器读数变化计算各子镜相对于参考镜的位姿变化量,从而唯一确定系统全局状态。结合矢量投影分析与位姿-促动映射矩阵,将估计的位姿变化量转换为旋转校正量及对应的促动器驱动指令。
通过引入基于奇异值分解的伪逆解,提出以噪声放大因子作为评估位姿估计精度的指标。进一步结合位姿变化量与旋转校正量的关系,提出加权噪声放大因子,用于表征估计噪声对子镜聚焦精度的影响。我们利用四镜面子系统在LAMOST现场开展了为期两周的实验,期间共进行24次共焦测试。现场环境温度波动显著,最大变化近12°C。实验结果显示,实现共焦保持后,光斑中心偏差保持在0.1角秒以内,其中超过85%的光斑中心偏差小于0.1角秒,97%以上的偏差处于±0.15角秒范围内。EE80值始终稳定在参考值附近,验证了该方法在镜面保持方面的优异性能。在传感器性能提升的基础上,该方案可满足分段镜面所需的光束共相位指标要求。